デジタルデータによる事故態様の解明
従来の事故態様認定と問題点
刑事・民事裁判を問わず、交通事故に関する裁判では事故態様についての争いは後を絶ちません。
事故態様は、刑事裁判では被告人の刑責や、場合によっては有罪・無罪を分け、民事裁判では過失割合という形で被害者が受ける賠償額を何千万円も増減させる要因になりえます。
しかし、従前の裁判実務では、事故当事者や目撃者の証言、これらの指示説明を前提として警察官が作成する実況見分調書など、当事者の虚偽や記憶違いが混在する可能性のある証拠に基づき、事故態様が認定されてきました。
また、より客観的といわれる証拠として、車両等の損傷状況や路面上の印象痕、交通事故鑑定人による鑑定結果などが用いられてきましたが、いずれも採証過程や定数の採用で人の恣意的判断が混在しかねません。
そのため、これらの証拠がどこまで「客観的」といいうるかは大いに疑問がありますし、あくまでも事故態様を間接的に推認するものに過ぎません。
そのような状況下を一変させたのが、デジタルデータです。
IT化、デジタルデータによる事故態様認定の変革と現状
ご存じのとおり、ドライブレコーダーや防犯カメラの映像データは、人の判断を介在させることなく事故状況を直接記録するものですから、これらが直接証拠として用いられることで、事故態様についての争いや曖昧な事実認定は激減しました。
ただ、すべての事案でこれら証拠が存在するわけではありませんし、核心的な部分が記録されていないこともあります。
また、極めて容易にデータを消去することも可能です。
他方、IT化が進んでいる現在の車両内外には、事故前後の車両の挙動等の運行データを自動的かつ半永続的に記録するイベント・データ・レコーダー(EDR)を中心として、「CAN」や「コネクテッドカー」などの車内・外通信データなど、事故態様解明に極めて有用な膨大なデータが蓄積されています。
しかし、大変残念なことに、裁判を運営する法曹実務家や警察及び保険会社担当者など交通事故に関わる関係者に、これらのデータ利用の知識もスキルも十分浸透していないのが現状です。
EDRデータ解析業務の開始

イベント・データ・レコーダー(EDR)のデータ を抽出する専用機器CDR
EDRとは、車両に一定の衝撃が加わった際、衝撃前後の一定期間の車両の加速度・車速・ブレーキの有無・ハンドル角度等の事故原因解明に役立つデータを自動的に記録する事故情報計測・記録装置(道路運送車両の保安基準46条の2)であり、事故態様の解明に大変貴重なデータです。
既に刑事・民事裁判の場面でも証拠として提出され、事故態様の争いについての決定的な証拠としての役割を果たしています。
nitroではこのEDRデータの抽出・解析業務を実施しています。
EDR業務については、こちらのページに詳しくまとめてございますのでご覧ください。
TA-SLAMの研究・開発
ドライブレコーダーや防犯カメラの映像から、事故状況をデジタルデータで正確に再現できたのなら、当事者や目撃者の主観や、ひいては捜査機関の恣意による事実と異なる証拠に基づく不公正な事実認定や裁判をなくすことができます。
また、ドライブレコーダーや防犯カメラの映像があれば、特別な技術を必要とせず、誰でも簡単かつ正確に事故状況が再現できるのなら、早期に事故態様や過失割合についての争いを解決することができます。
nitroでは、設立目的である「デジタルデータによる事故態様の解明」を実現するため、「TA-SLAM」の開発に取り組んでいます。

TA-SLAMの紹介動画です
TA-SLAMとは
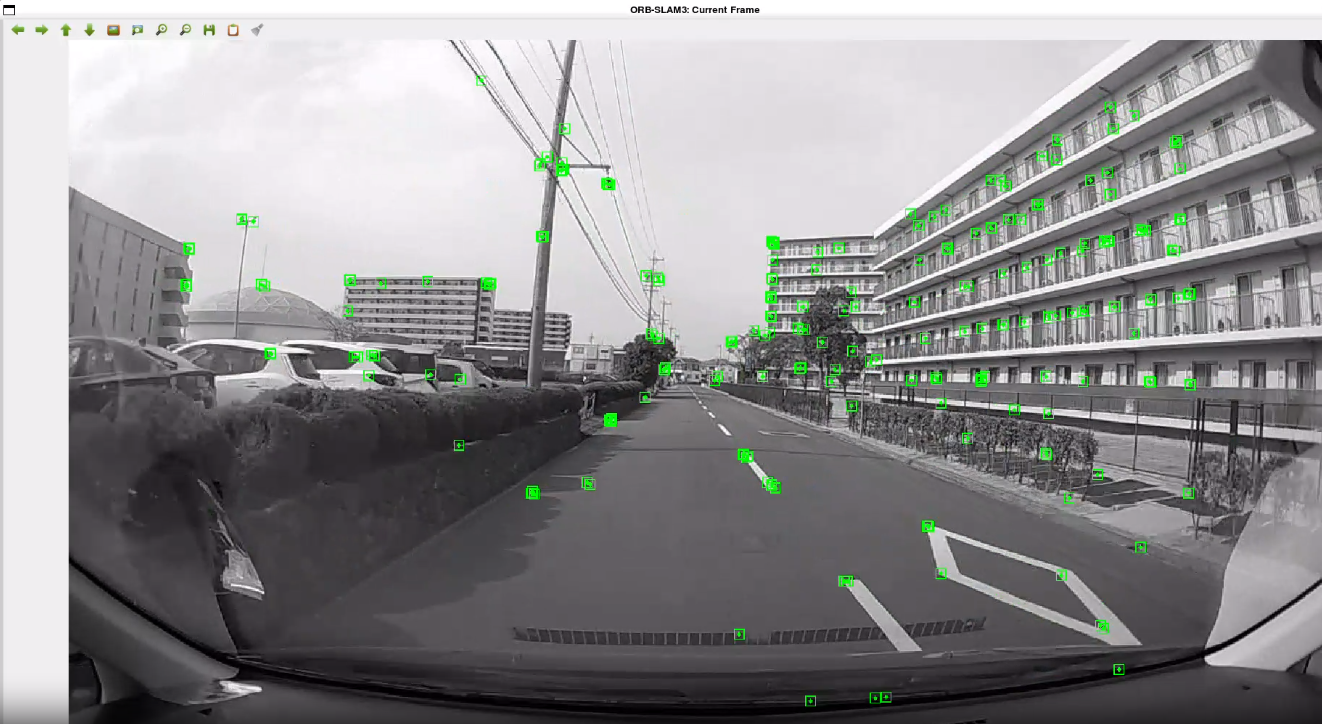
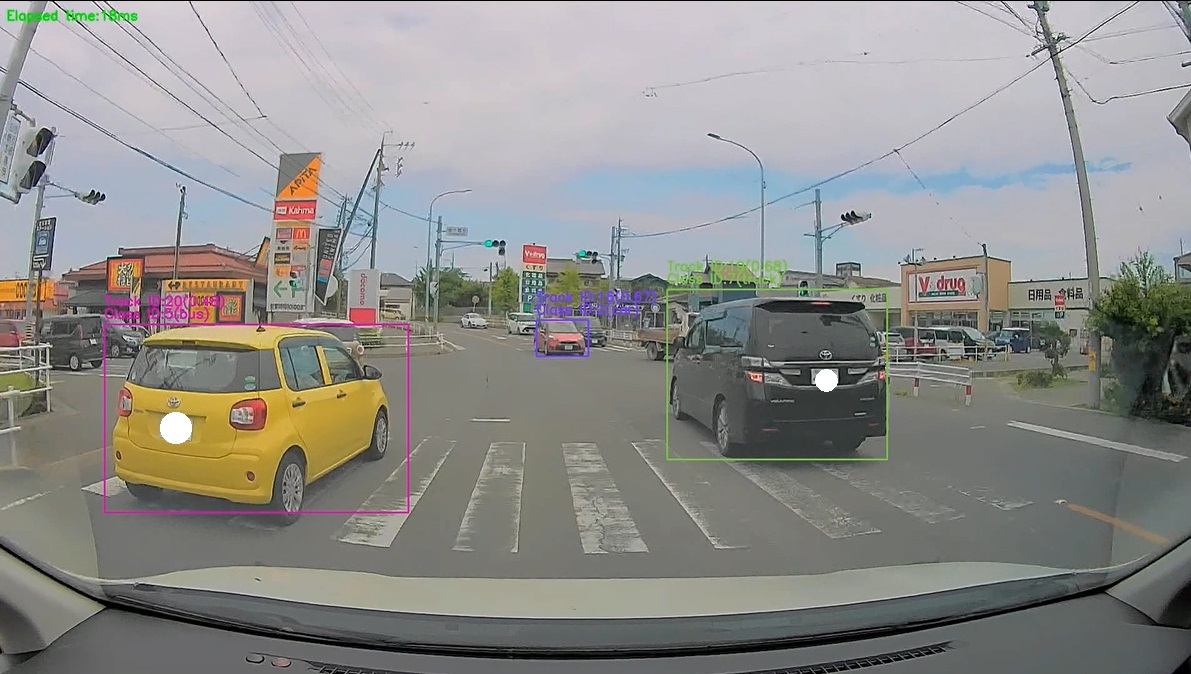
TA-SLAMによるドラレコ映像からの特徴点の抽出
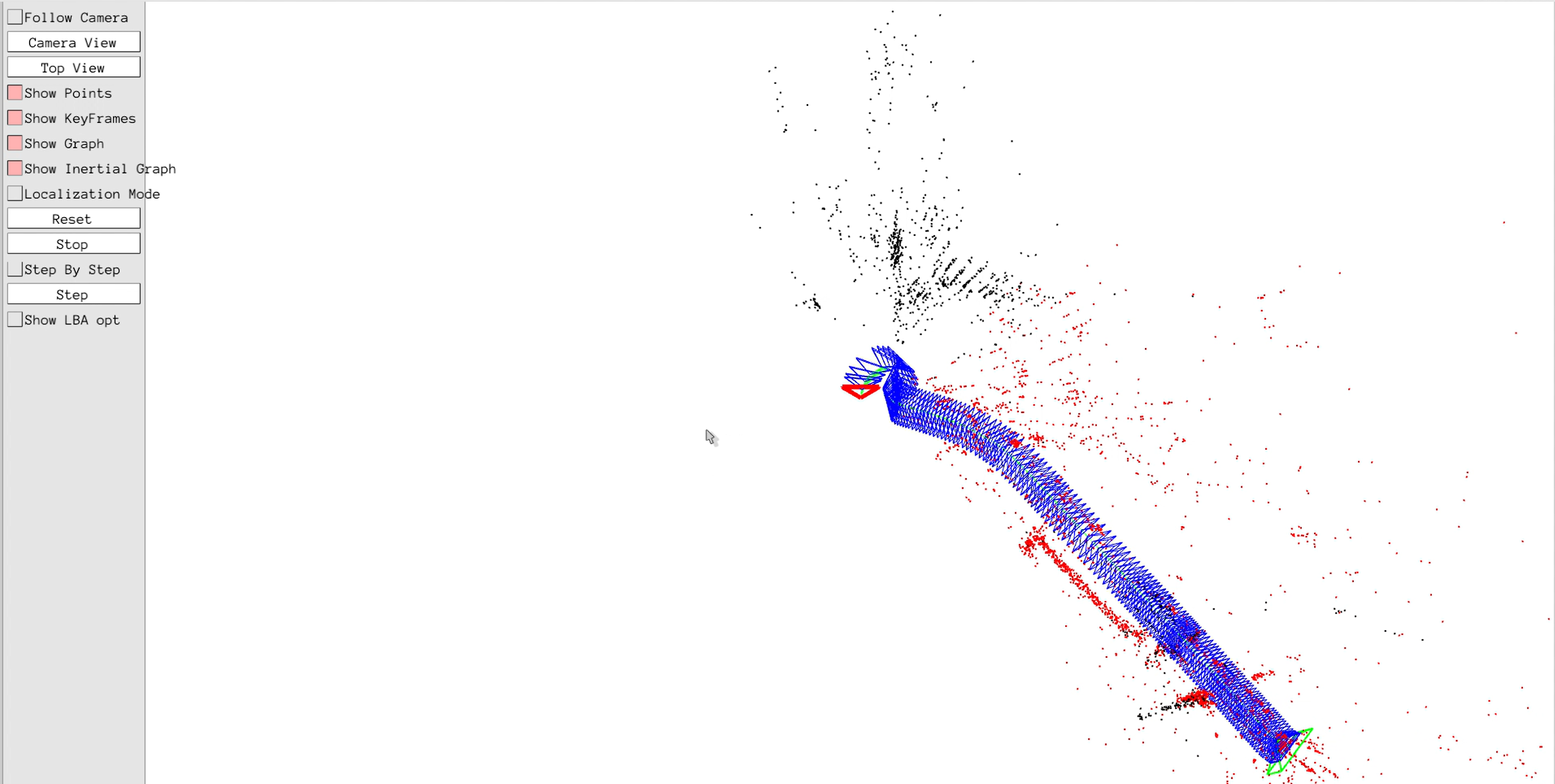
TA-SLAMによる軌跡の描出

令和5年1月17日 コンピュータービジョン研究の第一人者である慶應義塾大学理工学部 情報工学科 斎藤英雄教授との打合せ
TA-SLAMとは、「Traffic Accident SLAM」の略称で、Visual SLAM(ORB‐SLAM3)技術などの最新の映像解析技術を用いて、ドライブレコーダーの映像から各車両の絶対位置を推定し交通事故の状況を地図上で再現する技術です。
TA-SLAMによれば、ドライブレコーダーの映像のみから自車のみならず他車や人の挙動などの実際の交通事故の状況を座標軸によるデータ化することが可能になり、また座標データを用いて、二次元のみならず三次元地図上で事故状況を簡易かつ正確に再現でき、交通事故態様の解明を飛躍的に向上させます。
TA-SLAMの3つの主要技術
1 Camera Calibration(Camera Resectioning)
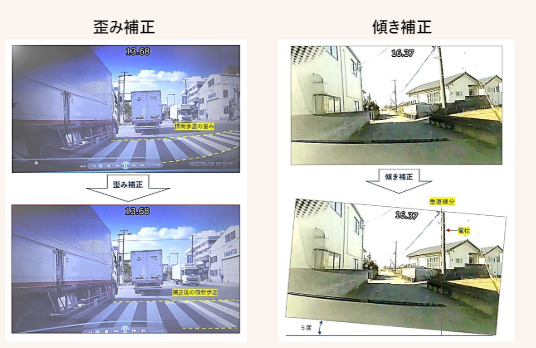
TA-SLAMによる正確な事故態様の再現のためには、ドライブレコーダーで使用されたカメラレンズの歪みや傾きを補正する必要があります。
TA-SLAMでは、ドライブレコーダーで使用されるカメラの一般的なパラメーターを用いたキャリブレーションファイルを作成し、これによりカメラキャリブレーションを行います。
2 自車位置推定及びマッピング~Visual SLAM(ORB-SLAM3)
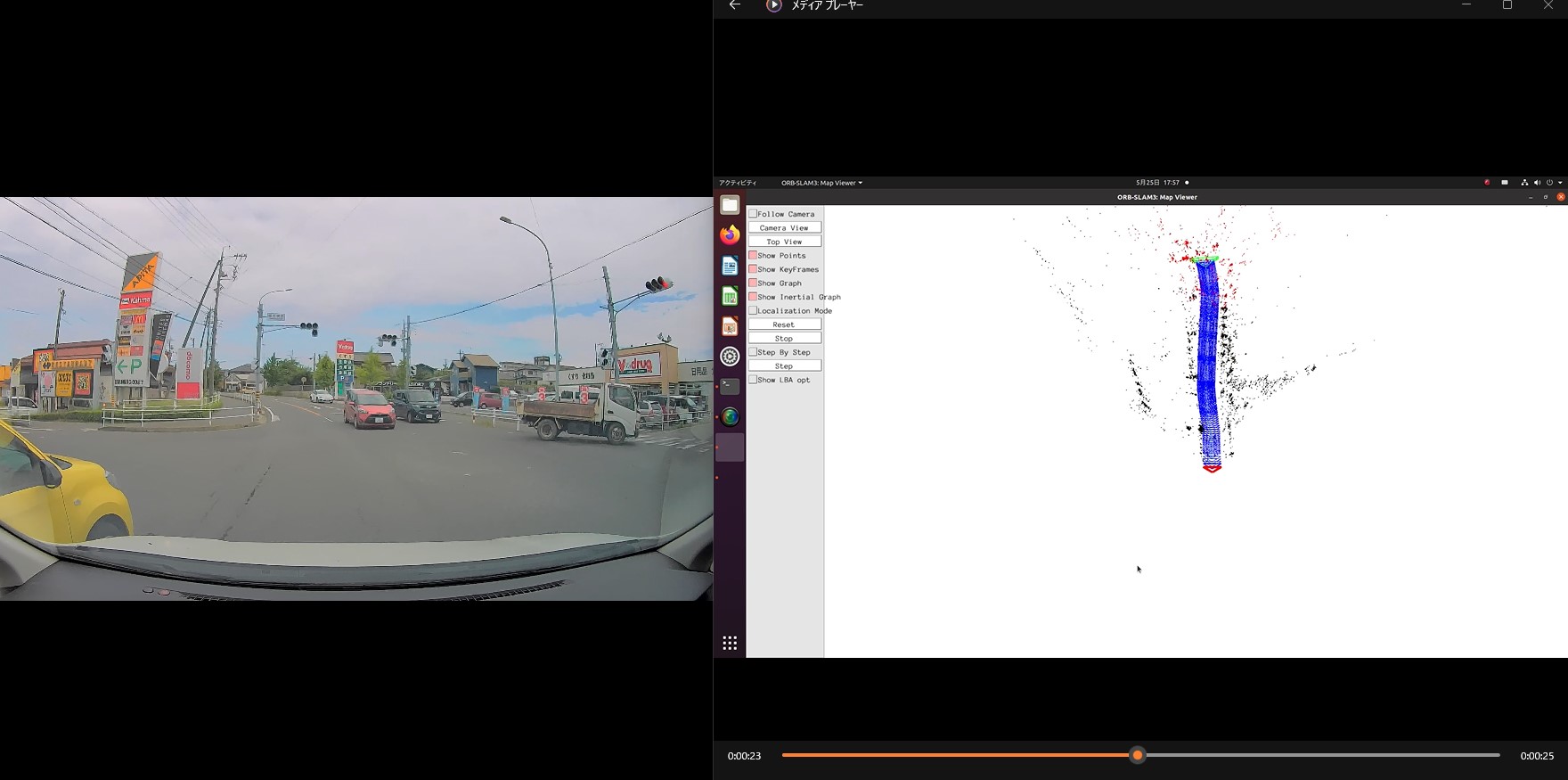
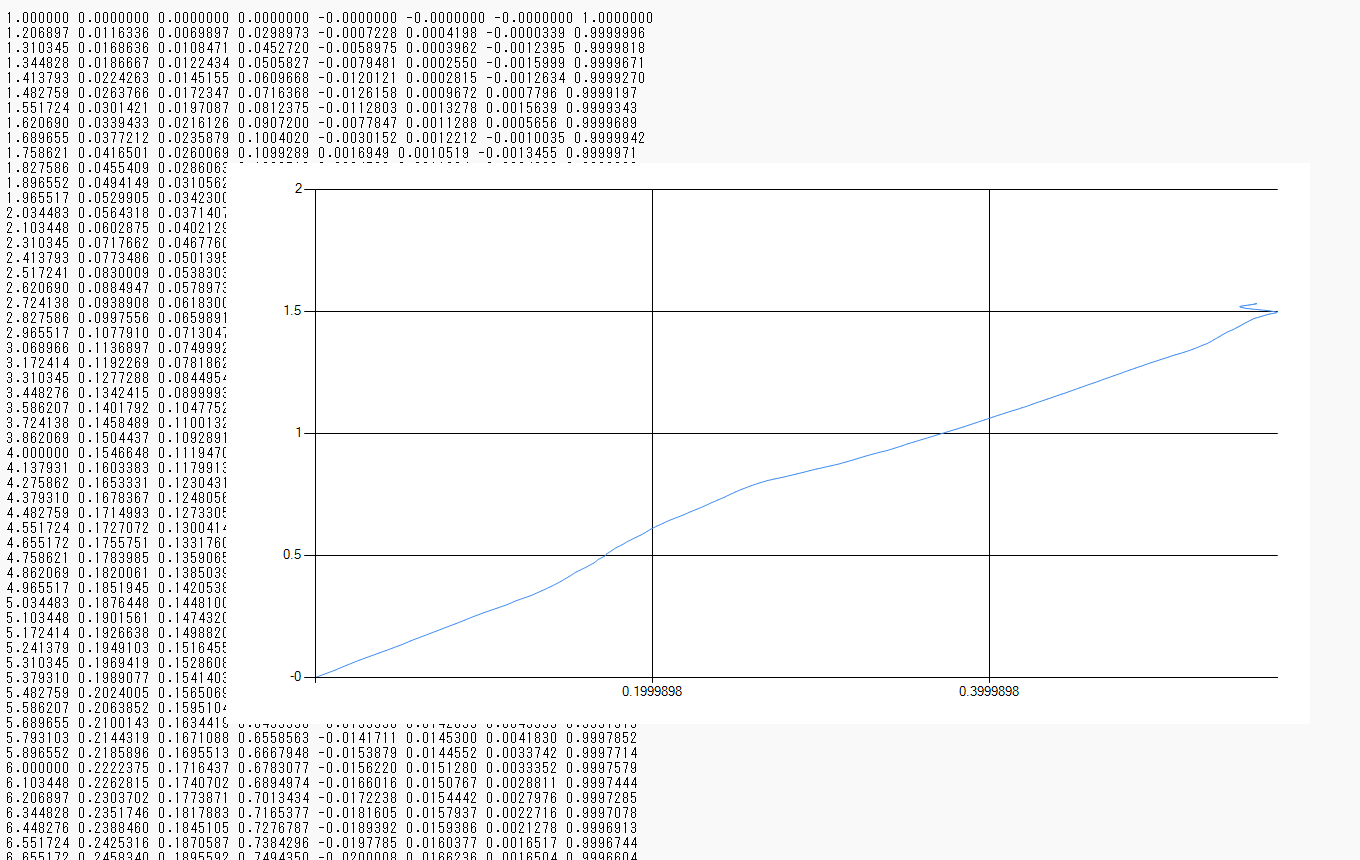
TA-SLAMにより得られた軌跡の座標軸とグラフデータ
TA-SLAMによるドラレコからの自車の軌跡描出の様子
Visual SLAM とは、映像を構成する画像から基準となる特徴点を自動で認識し、特徴点からの距離を測定し、自己の位置推定と環境地図の作成を同時に行う技術です。
TA-SLAMでは、自車の挙動をVisual SLAMであるORB-SLAM3というオープンソースコードを用いて推定し、その結果を時間やX/Y/Z軸等の8桁の座標系をCSVファイル形式で出力します。
現在、自車のマッピングの精度を高める研究を進めており、ORB-SLAMのほかオープンソースコードであるCOLMAPという三次元復元ツールの利用を検討しています。
3 人や他車の位置推定~YOLOを用いたObject Tracking Program
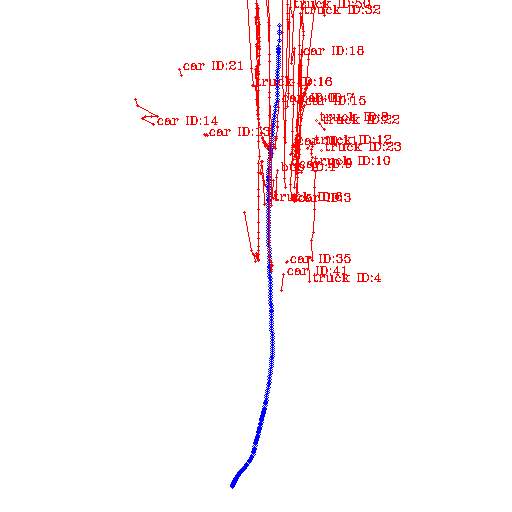
Yoloによる相手方車両の軌跡
Yoloによるドラレコからの他車の軌跡描出の様子
YOLOとは画像上の物体検出と識別を同時に行うオープンソースコードであり、TA-SLAMでは、事故の相手方の車両や歩行者等の位置をYOLOを用いたObject Tracking Programを用いて推定し、Visual SLAMにより検出された座標系上に投影します。
YOLOを利用した他車等の位置推定については、株式会社VISION&IT Lab様の協力を得て、現在開発をしております。
TA-SLAMによる事故状況再現例
二次元地図上での再現例

三次元CGによる再現例
TA-SLAMの活用例
1 より客観的な事故状況の証明のために
従前の刑事・民事裁判では、人の記憶や視覚という主観的な要素に基づき作成された実況見分調書や事故状況報告書等が重要な証拠とされてきました。
TA-SLAMによれば、ドライブレコーダーの映像という客観的かつ直接的な映像を基に、二次元もしくは三次元地図上で事故状況が再現できるので、より客観的で視覚的にわかりやすい証拠資料が作成できます。
2 自動運転車両の安全性評価のために
自動運転車両が安全かつ円滑に走行するためには、単なる事故のシミュレーションではなく、実際に起こった事故をできるかぎり大量かつ子細に分析し、実際の事故の原因を特定していく必要があります。
TA-SLAMによれば、大量に蓄積されたドライブレコーダーの事故映像から当事車両の挙動をデジタルデータで再現できるため、事故原因のデータベースの作成やこれを用いてより安全な自動運転車の開発を行うことができます。
3 より安全な道路交通の構築のために
交通事故の原因は運転者の不注意だけでなく、道路状況等の外部的要因に起因することもよく見られます。
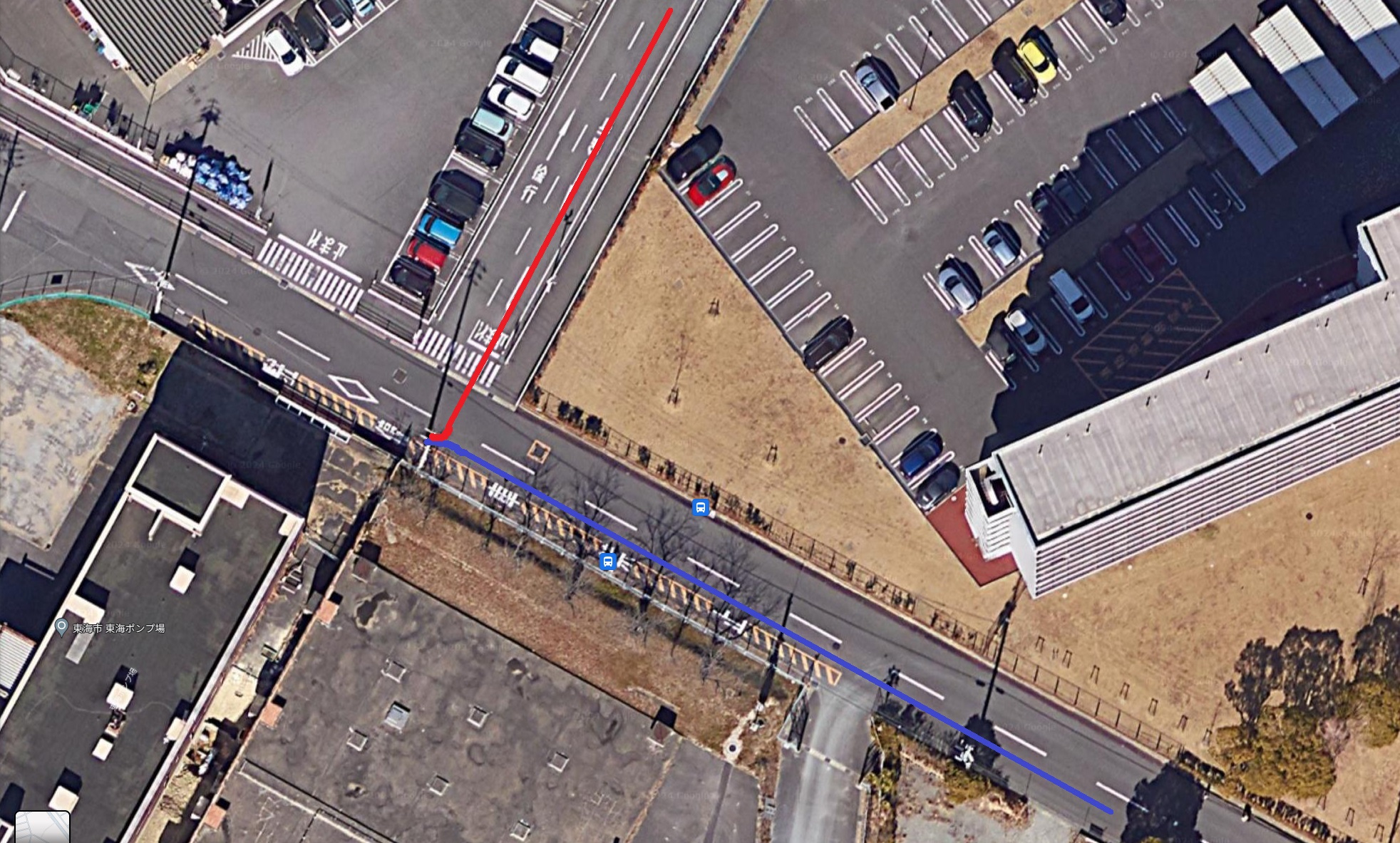
TA-SLAMでは現実空間上での絶対位置が特定されますので、実際の事故現場の事故状況のデジタルデータにより、事故が生じやすい場所を特定したり、事故が生じやすい外部要因を分析でき、より安全な道路環境の構築に利用することができます。
4 安全運転教育のために
三咲デザイン合同会社様ドライビングシミュレーター「Sirius」を利用した安全運転教育シミュレーター
TA-SLAMでは実際の事故での各車両や歩行者等の挙動をデジタルデータ化しますので、CGやシミュレーターを使えば、実際の事故をより簡易かつ正確に再現できます。
実際の事故を基にしたCGやシミュレーターを用いれば、どのような運転方法であれば事故を避けられたのかというより実践的かつ効果的な安全運転教育が可能になります。
誰もが納得できる交通事故裁判の実現を目指して
我々nitroは、EDRデータやカメラ映像などの交通事故解明に極めて有用なデジタルデータを交通事故裁判に正しくかつ簡便に利用できるよう調査・研究を進め、これら結果を基にした広報・講演活動等のアナウンスメントにより、真に客観的かつより事実に即し、誰もが納得できる交通事故裁判の実現を図って参ります。